tl;dr
End-to-end deep-learning based approach to resolve the point cloud registration problem. Main steps are:
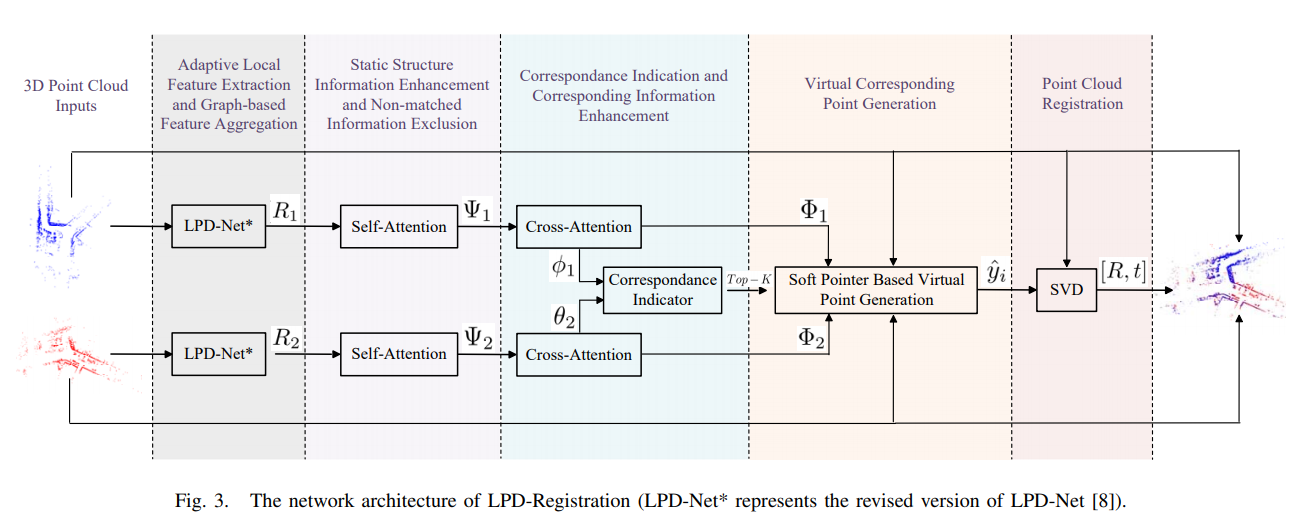
- LPD-Net is used to extract features and aggregate them with graph network.
- Self – attention mechanism is utilized to enhance the structure information of the PCL
- Cross – attention mechanism is deisned to enhace correpondences between the two PCLs
- Registration is then solved using SVD
Overall Impression
The authrs claim to support registration without initial predicition. They present LPD-Registration.
LPD-Registration utilizes a modified version of LPD-Net to extract the local features and aggregates them with the k-NN based graph network Nx3 -> N512 as it’s output.
They remove the process of aggregating local features to a global descriptor vector, and simplify the network by only performing graph-based neighborhood aggregation in the Cartesian space as well as the feature space.
The “Self-supervised pre-training algorithm for the revised LPD-Net” is quite shady and requires 1-to-1 correspondence between P1 and P2.
self-attention mechanism is used to enhance the static structure information in the largescale point cloud and exclude the parts which are difficult to match. basically uses softmax on the descriptors as a damper to points weights.
Cross Attention is used to enhance correpondences and a virtual correponding points is presented to offer alternative correspondences out of the Top-K points.
The loss for the training is correspondence loss including the accuracy of the virtual points as well. Worth mentioning that pose loss is not used here.
Key Ideas
- investigate the point cloud registration problem of large-scale point
clouds with local sparsity and partially correspondence
- end-to-end deep-learning approach is proposed by incorporating the self attention and cross attention mechanism to enhance the static structure information and indicate the correspondence of two point clouds.